| Автор | Сообщение |
|
домово
|

| |
Сообщение: 3362
Зарегистрирован: 13.05.08
Откуда: Питер
|
|

Отправлено: 03.06.12 02:32. Заголовок: БИОМЕХНИКА и техника бега
Совместными усилиями runner61, DroNN и домово проведены исследования техники бега с точки зрения движения центра тяжести (ЦТ) бегунов разного уровня. Давайте обсудим результаты, которые по моему весьма интересные!  |
 |

|
|
Ответов - 301
, стр:
1
2
3
4
5
6
7
8
All
[только новые]
|
|
|
домово
|
| |
Сообщение: 3423
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:18. Заголовок: согласен - отпихиваю..
согласен - отпихиваю и объясняю почему! мы с тобой убедились что на обычном датчике даже в одномерном случае
на столе датчик-ускорение-интергрирование-движение на 20 см туда обратно уже идет вразнос и не дает ничего
кроме разлетающихся вразные стороны кривых.
По моему мои сомнения в гораздо более сложной системе моделирования оправданы!
Ведь замеры всех перечисленных тобой параметров для этой системы - весьма большие трудозатраты
(а ведь сейчас кризис и у меня с финансами далеко не супер и надо зарабатывать на жизнь и на то что не дает денег
хотя и интересно остается не так уж много времени и сил) Так вот перед тем как бросаться на тяжелую нудную работу многочисленных
замеров хотелось бы быть увереным что это сработает а не разнесет модель на мелкие кусочки
Поэтому хотелось бы от проф физика той самой верификации и объяснения принципов этой системы.
И если я вижу что проф физику тяжело разобраться с этой системой то понимаю что мне вообще бесполезно
что и вызывает у меня обоснованный скепсис.
|
|
|
|
karaul
|
| |
Сообщение: 1841
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:29. Заголовок: домово пишет: мы с ..
домово пишет: | цитата: | мы с тобой убедились что на обычном датчике даже в одномерном случае
на столе датчик-ускорение-интергрирование-движение на 20 см туда обратно уже идет вразнос |
|
у меня другое мнение (противоположное - локальные ускорения на место крепления датчика измеряются достаточно точно, просто при интегрирование происходит потеря точности, но это неважно), но допустим ты прав. Но тогда, если ты прав и с этим нельзя работать и этому нельзя верить, тогда вся эта тема бессмысленна, и кривые которые ты дал в стартовом сообщении не имеют никакой ценности. (Хотя я проверял эти кривые и убедился что они в общем совпадают с классическими кривыми бега померенными в серьёзных лабораториях. Иначе бы я не обратил на это внимание.) |
|
|
|
домово
|
| |
Сообщение: 3424
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:33. Заголовок: имеют потому что я н..
имеют потому что я не делаю двойного интегрирования! (так как изначально сомневался в измерителях траекторий на датчиках ускорений)
все же интересно что там моделируется в этой системе по твоей ссылки...
например тоже движение колена туда и обратно - как же оно там считается на основе данных датчиков
ускорений - у нас же вразнос все пошло а у них что не пошло? или там датчики координат а не ускорений?
|
|
|
|
karaul
|
| |
Сообщение: 1842
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:34. Заголовок: домово пишет: хотел..
домово пишет: | цитата: | хотелось бы от проф физика той самой верификации и объяснения принципов этой системы.
И если я вижу что проф физику тяжело разобраться с этой системой |
|
здесь я не понял упрека. В чём проблема? Я дал все ссылки - видео, статья, руководство к программе. Читайте и разбирайтесь - там ответы на все вопросы. (Я тоже сейчас этим занят - читаю и разбираюсь.) Тяжело читать по английски, дайте время и проявите заинтересованность - кто-нибудь сделает перевод, это трудоёмко. |
|
|
|
karaul
|
| |
Сообщение: 1843
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:36. Заголовок: домово пишет: имеют..
домово пишет: | цитата: | | имеют потому что я не делаю двойного интегрирования! |
|
и в чем тогда проблема при измерениях? |
|
|
|
домово
|
| |
Сообщение: 3425
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:36. Заголовок: а у кого проблемы с ..
а у кого проблемы с измерениями?
|
|
|
|
домово
|
| |
Сообщение: 3426
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:37. Заголовок: karaul пишет: сдела..
karaul пишет: | цитата: | | сделает перевод, это трудоёмко. |
|
переводить трудоемко и измерения делать это нет? неужели там нет какого-то понятного и короткого пояснения для проф физиков? |
|
|
|
домово
|
| |
Сообщение: 3427
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:42. Заголовок: да я и прояляю заинт..
да я и прояляю заинтересованность - потому что просто перевести недостаточно надо понять про что текст и специалисту в той области про что текст несомнено это сделать легче... в тоже время никто не обидется и не возмутится если тебе просто будет лень - все мы люди все устаем так что все Ок. Программа интригующая и за ссылку на нее спасибо!  |
|
|
|
karaul
|
| |
Сообщение: 1844
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:42. Заголовок: домово пишет: ам не..
домово пишет: | цитата: | | ам нет какого-то понятного и короткого пояснения для проф физиков |
|
есть конечно - в статье 2 страницы текста (300 страниц как работать с программой). Ты их прочитал (2 стр), или сразу бросился спорить? |
|
|
|
домово
|
| |
Сообщение: 3428
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 01:46. Заголовок: я посмотрел видео и ..
я посмотрел видео и сразу возникли крупные сомнения - тело двигалось закрепощенно и неестественно и мышцы пружины антогонисты работали одновременн
это сразу вызвало внутренний протест и сильные сомнения
текст на главной просмотрел но ничего о принципах не понял...
|
|
|
|
karaul
|
| |
Сообщение: 1845
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:53. Заголовок: закрепощенно потому ..
закрепощенно потому что упрощенная модель. о принипах спец. раздел в статье. Важное я поместил ниже, читать и разбираться (ссылки в статье даны) вокруг этих кусков   |
|
|
|
|
|
karaul
|
| |
Сообщение: 1846
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 01:59. Заголовок: В модели решается c..
В модели решается constrained multibody dynamic system.
Что это такое написано в любом учебнике по класс.механике,
в институте учат на 1-2 курсе, грубо, это каркас и пружинки.
Гравитация, реакция опоры и проч. учитывается. Если модель бежит и не падает -- это нетривиальный результат. В большинстве случаев, если случайно задать каркас и пружинки, то модель даже стоять не сможет, решение модели покажет как каркас сразу валится на пол из-за гравитации.
|
|
|
|
домово
|
| |
Сообщение: 3429
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 02:05. Заголовок: а также есть мускуль..
а также есть мускульная сила. Но вот откуда они взяли F(t) для всех мышц? по моему на вышеприведенных цитатах ответа нет  там Fm - не понятно это набор констант - набор расчитываемых переменных? набор заданных графиков Fm(t) |
|
|
|
домово
|
| |
Сообщение: 3430
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 02:08. Заголовок: домово пишет: решен..
karaul пишет: | цитата: | | решение модели покажет как каркас сразу валится на пол из-за гравитации. |
|
вот тут тебе в обратку обвинение  ты спрашивал почему я не стал читать а сразу спорить да потому что ты написал это мне стало ясно через 0.1 сек просмотра видео! бежит неуклюже а не падает! Ты недооцениваешь меня! я тебе пытался втолковать это на предыдущих страницах и нифига не получилось но ведь и дальше странно - допусим померяли все суставы на живом бегущем датчикми ускорний но из-за [skip повторы] все равно упадет! |
|
|
|
karaul
|
| |
Сообщение: 1847
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 02:11. Заголовок: домово пишет: по мо..
домово пишет: | цитата: | | по моему на вышеприведенных цитатах ответа нет |
|
я же написал - надо разбираться. В цитате-картинке ссылки на другие работы. Это значит что тот или иной сустав ту или иную мышцу уже моделировали раньше. Как именно - надо идти по ссылке. Там же в ссылке будет указание откуда берется мускульная сила. Модель устойчиво бежит, движение костей модели сравнивается с экспериментом с хорошим совпадением. Значит, есть спец.параметр в модели который вводит мускульную силу. Не надо есть слона целиком. |
|
|
|
домово
|
| |
Сообщение: 3431
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 02:14. Заголовок: больше всего мне нра..
больше всего мне нравится что ученые думают что мы все тупые и вместо того чтобы сразу объяснить откуда бралось мышечные силы начинают разводить антимонии - самое интересное куда-то закопали глубоко внутри слона - зачем? |
|
|
|
домово
|
| |
Сообщение: 3432
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 02:15. Заголовок: мы же отлично понима..
мы же отлично понимаем - в беге вся фишка в генерации Fm(t) а все остальное описано в учебниках для 1 класса
|
|
|
|
karaul
|
| |
Сообщение: 1848
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 02:29. Заголовок: вот статья которая д..
вот статья которая дает механическую модель мышцы, см рис 1 и формулы Musculotendon forces derived by different muscle models http://www.actabio.pwr.wroc.pl/Vol9No2/6.pdf The muscle is assumed to consist of two components: an active force generator and parallel passive component. The model for the active contractile component is based on the generally accepted notion that the active muscle force is the product of three factors: (1) a length–tension relation, (2) a velocity–tension relation and (3) the activation level. The passive component includes a parallel elastic element and passive muscle viscosity Грубо - модель мышцы как ф-ция углов\расстояний это как потенциал взаимодействия между частицами. Или простейшие элементы в электронной цепи. В гугле можно найти статьи описывающие как на живом человеке найти параметры для этих моделей - я встречал эти статьи, но подробно не разбирался In vivo determination of subject-specific musculotendon parameters: applications to the prime elbow flexors in normal and hemiparetic subjects http://www.clinbiomech.com/article/S0268-0033(02)00031-1 |
|
|
|
karaul
|
| |
Сообщение: 1849
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 08:40. Заголовок: закладка Simulation..
|
|
|
|
Chapay
|
| |
Сообщение: 4534
Зарегистрирован: 17.06.07
Откуда: Russia, Мытищи
|
|
Отправлено: 11.06.12 09:07. Заголовок: домово Если на какое..
домово Если на какое-то время поток "соскочил" с реал-тайма, то это время невелико - он потом туда возвращается. У Вас никаких критических задач по управлению нет - просто нужно наблюдать и там, где выскочило время больше обычного времени цикла - эти куски просто выкинуть. И перемерить. Вы ж измерять будете циклический процесс, ну некоторые циклы окажутся бракованными из-за долбаной винды, шоб ей....
Вызовы всё равно произойдут по-очереди - времени и опрос датчиков, так что момент снятия чтения информации будет известен с хорошей точностью.
Кстати, RTX не пользовали?
|
|
|
|
Chapay
|
| |
Сообщение: 4535
Зарегистрирован: 17.06.07
Откуда: Russia, Мытищи
|
|
Отправлено: 11.06.12 10:01. Заголовок: karaul Да-да, конеч..
karaul
Да-да, конечно. Я просто озвучил, что сразу возникло в голове. Давайте разбираться. Я тоже почитаю. Кстати, почти сразу наткнулся там на нервные импульсы, но не понял как они в эту систему встроены и встроены ли вообще?
Желания Домово понятны. Получить сразу систему управления движенем при беге (с обратной связью) и с учётом нелинейностей мыщц и т.п. На блюдечке, с голубой каёмочкой.
Вопросы про F(t)? - Конечно, F(t) - продукт системы управления движением. Скорее всего, авторы программы всё же не решали задачу управления. В-общем, надо разбираться.
Если F(t) ввели "эмпирически", да хоть просто взяв некие шаблоны из какой-то модели (да хоть F(t)=const) и впихнув куда нужно, чтобы было движение бега, то и эта система имеет право на внимание, при условии, что даёт результаты близкие к измерениям. А она их даёт! Я видел графики - практически один в один!
|
|
|
|
|
|
karaul
|
| |
Сообщение: 1850
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 10:23. Заголовок: Chapay пишет: почт..
Chapay пишет: | цитата: | | почти сразу наткнулся там на нервные импульсы, но не понял как они в эту систему встроены и встроены ли вообще? |
|
смотря где вы наткнулись. В введении (скорей всего, но это чтобы было понятно, для инвесторов), или в содержательной части (маловероятно). Кратко что мы имеем (1) класс. механика - уравнения для каркаса с пружинками были получены в позапрошлом веке. Но пока не было компьютеров решали всего 3-5-10 уравнений. А сейчас могут сотни. Проблема там не столько в решении, сколько в сложной геометрии, на коленке эти уравнения не выпишешь из-за сложных координат (подвесы, рычаги, углы и проч) . (2) что собой представляет мыщца-сухожилие поняли лет 20-50 назад. Были предложены модели и опробованы. Кратко в мышце есть пассивная и активная часть, есть запас энергии, есть диссипация. Надо читать литературу для подробностей. Но для каркаса с пружинками подробности неважны. Зато важно что как ф-ция расстояния и углов механическая модель мышцы ведет себя правдоподобно. (3) И вот "блюдечко, с голубой каёмочкой": пакет для симуляции которая автоматически генерирует (1) с привлечением (2). |
|
|
|
Chapay
|
| |
Сообщение: 4536
Зарегистрирован: 17.06.07
Откуда: Russia, Мытищи
|
|
Отправлено: 11.06.12 10:28. Заголовок: karaul Да. А что ка..
karaul
Да. А что касается равновесия, так для его поддержания усилиями можно пренебречь, к тому же в идеальной задаче оно и не рассматривается. (Особенно боковое).
|
|
|
|
karaul
|
| |
Сообщение: 1851
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 10:37. Заголовок: Chapay это трехмер..
Chapay
это трехмерная модель там есть равновесие. В двумерных моделях равновесием пренебрегают. Двумерные модели тоже есть: подвес на пружинках. Там меньше 10 уравнений и всего 3-5 параметров (в 3D - сотни уравнений и параметров).
Траекторию ЦТ для ходьбы и бега 2D модели описывает хорошо, и сначала я работал с ними. Самыe первые рисунки в теме, где я сравнивал экспериментально померенные силы на ЦТ с результатами домово, взяты из статей где 2D модели сравнивались с экспериментом.
|
|
|
|
karaul
|
| |
Сообщение: 1852
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 11:03. Заголовок: статья в Википедии ..
|
|
|
|
домово
|
| |
Сообщение: 3433
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 11:21. Заголовок: Chapay прав - пока н..
Chapay пишет: | цитата: | | Кстати, почти сразу наткнулся там на нервные импульсы, но не понял как они в эту систему встроены и встроены ли вообще? |
|
Chapay прав - пока не узнаем откуда брать F(t) и как ее вводить в модель - она не побежит а будет очень правдоподобно падать как человек которому вышибли мозги в качестве шутки с тонкой аналогией - представим физики составили 1млн диф уров и создали механическую 3D модель Каспарова играющего в шахматы c Карповым без привлечения понятия МОЗГ - только за счет анализа движения рук, пальцев и мышц |
|
|
|
домово
|
| |
Сообщение: 3434
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 11:36. Заголовок: то что уважаемый физ..
то что уважаемый физик karaul потратил чуть ли не сутки но не смог (надеюсь пока) найти как вводится F(t) наводит на мысль что это ноу-хау автора симулятора и он не раскрывает его! |
|
|
|
домово
|
| |
Сообщение: 3435
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 12:08. Заголовок: Позволю себе по диле..
Позволю себе по дилетански порассуждать - если karaul скажет чушь то удалю как я понял модель мышцы - пружина + сократительный элемент и параллельно им демпфер то есть масса мышцы не учитывается, и источник силы это сократительный элемент то есть F(t) это наверное с некоторым пересчетом есть Ф(t) функция движения этого сократительного элемента То есть для движения модели с мышцами-с-потерями(демпфером) нужна возбуждающая ф-ия Ф(t) в том числе как источник энергии. (также как для поддержания вынужденных колебаний в эл контуре с сопротивлением нужна батарейка и управляющий элемент) Понятно что Ф(t) можно разложить в ряд Фурье и получить некие постоянные коэф которые и можно считать начальными условиями  То есть от понятия мозга для периодической модели можно отказаться. (но тогда она все равно упадет но возможно не сразу - а на демо видео можно зациклить несколько первых шагов тонко скрыв от наблюдателя самое интересное - правдоподобную потерю равновесия и падение модели) Те модели на пружинах что я читал - без возбуждающей функции а с начальными условиями... судя по картинкам дают периодическое решение без затухания из-за потерь Ну как это сделано на самом деле в симуляторе надеемся karaul разберется... Про спринтеров пока не прочитал... |
|
|
|
fa
|
| |
Сообщение: 1523
Настроение: А как же!
Зарегистрирован: 28.04.10
Откуда: Москва
|
|
Отправлено: 11.06.12 12:16. Заголовок: karaul пишет: Если ..
karaul пишет: | цитата: | | Если соберётся достаточно русских энтузиастов (оч.вероятно что из русских мало кто об этом пакете пока знает) то можно перевести. |
|
Если это будет действительно актуально, готов вложить некую часть сил в первод |
|
|
|
домово
|
| |
Сообщение: 3436
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 12:24. Заголовок: ну на самом деле он ..
ну на самом деле он избыточен - в матлабе все есть для 2D модели бегуна и для моделирования мышц по 3х элементной схеме
А еще 3D-max и какие-то продукты Autodesk и много других - ведь мы смотрим мультики с реалистичным 3D
пресонажей и не только людей - а также играем в 3D игры и в некоторых физика движений персонажей
весьма реалистична и считается в реальном времени - также на дискавери показывали как на персонажей
живых вешают датчики по всему телу и мгновенно получают их каркасные модели на которые тут же
навешивают разные текстуры и тд - так что не думаю что этот пакет единственный и первый
Наверняка на рутреке полно подобных
|
|
|
|
karaul
|
| |
Сообщение: 1853
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 12:27. Заголовок: домово пишет: но не..
домово пишет: | цитата: | | но не смог (надеюсь пока) найти как вводится F(t) |
|
я не искал, т.к. это неважно, поэтому специально не обсуждается. Это секрет полишениля, который открывается на стр.180 руководства.  домово пишет: | цитата: | | Ф(t) можно разложить в ряд Фурье и получить некие постоянные коэф которые и можно считать |
|
не надо. Мускульная динамика решается согласованно с прочей динамикой. См. уравнения в красных прямоугольниках |
|
|
|
|
|
домово
|
| |
Сообщение: 3437
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 12:36. Заголовок: однако судя по стать..
однако судя по статье - как я раньше говорил и как указывал Chapay - muscles respond to INPUT neural excitation x х - называются управляторами модели. Значения Х расчимтываются по начальным условиям по некоторому набору диф уров описывающих динамику мускульного возбуждени. То есть не модель расчитывает силу сокращения мышц X - а наоборот - движение модели является
ответом на ввод (input) в модель управляющих X Это в точности что я сказал еще вчера вечером. Для моделирования нужны физ параметры которые мы можем снять весами и сантиметром с человека и главное нужна возбудающая ф-ия X либо как таблица либо как формула либо как система диф уров с начальными условиями И так откуда нам взять X как я понял karaul считает что на не нужно знать X -просто туда запихать случаные значения или вовсе 0 и модель вдруг сама по себе оживет и побежит или пойдет или закрутиться на месте! Думаю тут как раз вмещается Мировой Дух и внемля нашим просьбам заставит модель именно побежать и именно вперед и именно стой скоростью с которой мы телепатически захотим. |
|
|
|
karaul
|
| |
Сообщение: 1854
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 12:44. Заголовок: fa пишет: Если это ..
fa пишет: | цитата: | | Если это будет действительно актуально, готов вложить некую часть сил в перевод |
|
Спасибо за предложение. Но пока нет восторженной реакции подобно той которую я испытал сам когда понял что это за пакет. Поэтому я неуверен что перевод актуален. Что актуально -- запустить модель бегуна на исполнение. У меня не доходят руки. Там нужно читать мануал, разбираться с опциями меню, на это надо несколько дней и свободную голову. Когда модель побежит, и наиграемся с параметрами, можно перевести мануал. Тем более что прежде чем переводить надо понимать смысл перевода. Главный материал с сайта я скачал, готов предоставить в виде ссылки на фолдер (~ 200мб) в дропбоксе тем кто испытывает затруднения при скачке с оффиц.сайта. Желаюшие, сообщите свой емайл в Л.С. я вышлю приглашение в дропбокс. |
|
|
|
домово
|
| |
Сообщение: 3438
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 12:49. Заголовок: имхо мое дилетанское..
имхо мое дилетанское мнение - самое ценное в этой системе и модели - возбуждающее или управляющее или входное Х вытянув его из модели можно сделать простую 2D модель в матлабе на пружинках и запитать ее X Также интересно узнать как снимать X с бегущего человека. |
|
|
|
домово
|
| |
Сообщение: 3439
Зарегистрирован: 13.05.08
Откуда: Питер
|
|
Отправлено: 11.06.12 12:54. Заголовок: вот кстаи мы видим р..
вот кстаи мы видим разницу между инженерами и физиками! Уже два человека говорят физику что он копает не в ту сторону - но тот упорствует и пытается понять систему на уровне столкновений молекул а не общей идеологии. Интересно что тоже было при обсуждении биохимии бега, проф биохимики сразу ушли на уровень молекул в результате пришли отрицанию аэробного пост-гликолиза в то время как практики уже сделали реально работающее на примере Петровича лекарство активирующее аэробный пост-гликолиз! |
|
|
|
karaul
|
| |
Сообщение: 1855
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 13:03. Заголовок: Есть комммерческий а..
Есть комммерческий аналог, называется Anybody http://www.anybodytech.com/?id=20 The AnyBody Modeling System™ The leading musculoskeletal modeling software to solve design problems on ergonomics. |
|
|
|
karaul
|
| |
Сообщение: 1856
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 13:37. Заголовок: домово пишет: нужн..
домово пишет: | цитата: | нужна возбудающая ф-ия X либо как таблица либо как формула либо как система диф уров
с начальными условиями
И так откуда нам взять X |
|
я же написал выше, всё решается самосогласованно. И даже дал рисунок с уравнениями. домово вы заядлый спорщик, но вместо того чтобы искать ошибку у оппонента, попробуйте искать истину. В общую систему уравнений входят обобщённые кординаты (траектория движения тела) и мускульные актуаторы (дают мускульную силу для движения). Решается прямая и обратная задача. В прямой задаче: актуаторы-входной параметр и траектория- выходной В обратной (более приближена к реальности) наоборот: траектория - входной параметр, актуторы - то какие мышцы при этом напрягаются и как сильно - на выходе. Человек ведет себя как в обратной задаче: например выбирает куда поставить ногу, и потом для этого напрягает мышцы. Для бега поочередно согласованно решается нелинейная задача. Траектория1 - Актуаторы1 - Траектория2 (следует в т.ч. из актуатров 1) - Актуаторы2 - .... Мы задаём интегральные параметры бега: размер шага, частоту, углы в суставах в крайних позициях (техника бега, ага), и проч. Также задается геометрия тела: длина\вес конечностей и проч, модель мышцы (аэробная или анаэробная, ага). М модель уже рассчитывает какие мышцы в каком порядке надо напрячь чтобы бежать с заданной геометрией тела, заданной техникой бега и скоростью при наличии заданных мышц. **** Более подробно о прямой и обратной задаче здесь http://rrg.utk.edu/publications/Seth_et_al_2011.pdf |
|
|
|
karaul
|
| |
Сообщение: 1857
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 13:45. Заголовок: http://f1.s.qip.ru/7..
|
|
|
|
karaul
|
| |
Сообщение: 1858
Зарегистрирован: 31.01.11
Откуда: Кипр, Никосия
|
|
Отправлено: 11.06.12 13:50. Заголовок: Chapay пишет: Желан..
Chapay пишет: | цитата: | | Желания Домово понятны. Получить сразу систему управления движенем при беге (с обратной связью) и с учётом нелинейностей мыщц и т.п. На блюдечке, с голубой каёмочкой. |
|
да, именно так и сделано - система управления движением при беге (с обратной связью) и с учётом нелинейностей мыщц. А желания домово я понимаю всё меньше и меньше. Мне кажется ему просто нравится спорить, неважно о чём. |
|
|
|
Chapay
|
| |
Сообщение: 4537
Зарегистрирован: 17.06.07
Откуда: Russia, Мытищи
|
|
Отправлено: 11.06.12 16:12. Заголовок: karaul пишет: пока ..
karaul пишет: | цитата: | | пока нет восторженной реакции |
|
Есть такая реакция! Как я понял, система может рассчитать усилия в мышцах из траектории и антропометрических данных. Причём она трёхмерна! Бегун видит (или его тренер), где эта траектория плоха, её подправляют и система выдаёт новые усилия, которые можно сравнить с предыдущими (на "плохой" траектории) и понять что должно напрягаться и в какой момент. Там всё вылезет: неправильная постановка ноги, отсуствия захлёста или излишний захлёст, неправильные руки и т.д. Там уже надо вместе с тренером определять с чего начинать исправляться. Но! Нужна исходная траектория. Не понял, почему невозможно восстановить траекторию по ускорениям. Поларовские датчики именно по инерции измеряют расстояние. А может, достаточно раскадровки со скоростного фотоаппарата? karaul разберётся с вводом траектории и тогда мы узнаем что нужно, чтоб сказку сделать былью. То, что программа пока бесплатна, действительно, редкая удача, которую надо ловить за хвост. А насчёт "разумности"... чтоб она сама сообразила побежать по "оптимальной" траектории.... Ну это уж слишком! Товарищи бегуны, вы сами определитесь для начала, что для вас оптимальный бег. Вон ходят пешком марафоны, и называют себя бегунами-марафонцами, кто-то босиком, кто-то в марафонках, а кто-то в кроссовках, подошвы которых всё больше напоминают пружины. укого-то руки перед носом ходят, а у кого-то выше поясницы не поднимаются и т.д. и т.п. Нет уж! Давайте-ка траеторию которая есть и которая вам нужна, а мы вам всё рассчитаем и вперёд работать над собой! И другой подход мне в голову не приходит. Так что я записываюсь в фанаты к физикам! (а кто не запишется, того объявим вне закона... индукции и отключим свет!) п.с. пусть сидит на батарейках.  |
|
|
|
Ответов - 301
, стр:
1
2
3
4
5
6
7
8
All
[только новые]
|
|






 ты спрашивал почему я не стал читать а сразу спорить
ты спрашивал почему я не стал читать а сразу спорить 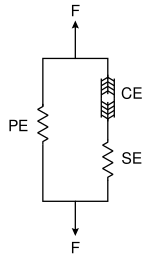
 То есть от понятия мозга для периодической модели можно отказаться.
То есть от понятия мозга для периодической модели можно отказаться. 
